
מישיגן סיינטיפיק מתמר דופק גלגל ברזולוציה גבוהה (WPT) הוא מקודד אופטי אשר מתחבר לאומי הזיזים של גלגל של רכב. ה-WPT משמש בדרך כלל למעקב אחר מיקום הרכב ומהירותו עבור יישומים כגון ניהול צי ו מעקב אחר רכב אוטונומי. מחקר מקרה זה ידגים את הדיוק של שימוש בשני מתמרי דופק גלגלים יחד, תוך השוואת מדידות המיקום והמהירות לנתוני GPS.
איך זה עובד
האות מהמקודד משמש לחישוב המיקום והמהירות הזוויתית של הגלגל. ניתן לבצע ממוצע נתונים שנרשמו על ידי שני WPTs משני צדי המכונית כדי למצוא את המרכז, וכך לתת את הייצוג המדויק ביותר של המרחק והמהירות שהמכונית נסעה. רכבי מיפוי משתמשים לרוב ב-WPT כדי לפצות על הפסקות באות ה-GPS, מה שמאפשר מעקב אחר המרחק שעבר במהלך אובדן האות. במחקר זה, הרזולוציה הגבוהה של נתוני ה-WPT תפקדה הרבה יותר מזו של חיישן ה-GPS ששימש בשל קצב הדגימה הגבוה שלו של 10,000 הרץ.
הגדרות בדיקה
כדי להשוות את תוצאות מתמר הדופק של הגלגלים לתוצאות ה-GPS, הוצמדו לרכב שתי מערכות WPT, אחת בצד ימין אחורי ואחת בצד שמאל אחורי. המתמרים הורכבו על הגלגלים האחוריים כך שלא יהיה צורך לפצות בנתונים על תנועת הסיבוב של הגלגלים הקדמיים. מכשיר GPS הונח על גבי הרכב, במרכז הגג מעל הגלגלים האחוריים, שם ייתן את הקריאה המדויקת ביותר. מרחקים ומהירויות WPT משמאל וימין נקבעו בממוצע כדי להתאים לאות ה-GPS במרכז הרכב. המסלול באורך קילומטרים המוצג להלן, יחד עם עלילת קווי רוחב ואורך מה-GPS, כולל סיבוב ותמרון זיגזג.
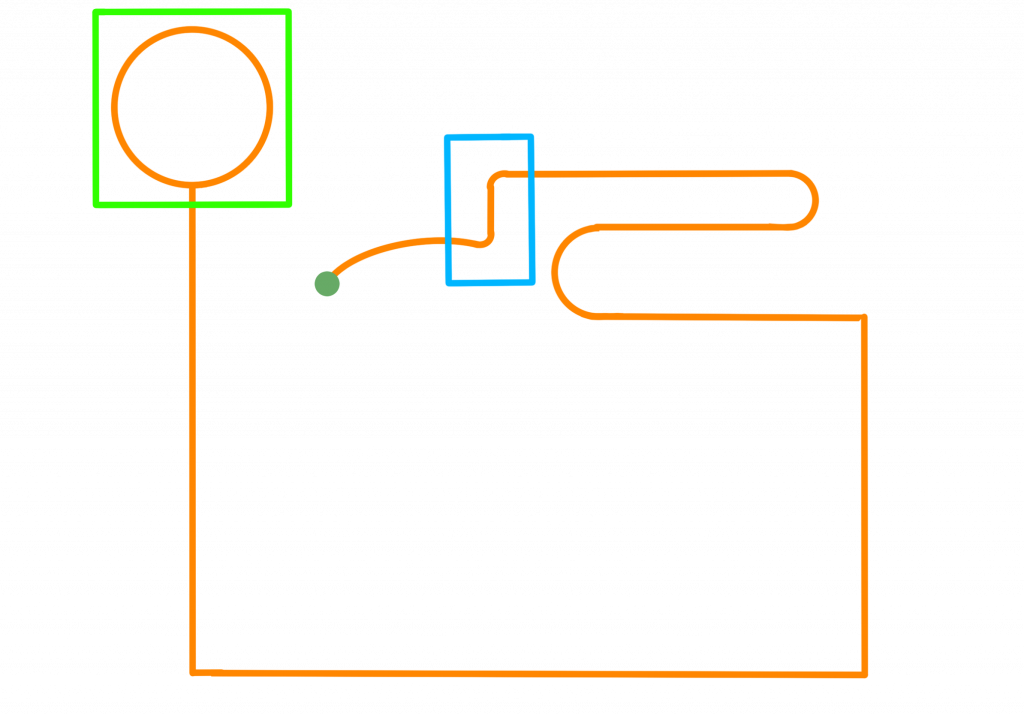
מתאר מסלול מבחן
נתוני GPS ממסלול מבחן
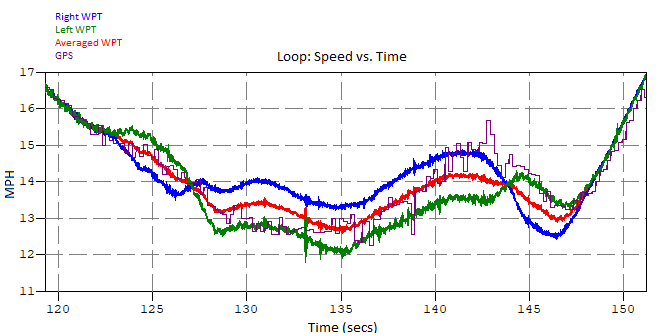
לולאה
כאשר הולכים נגד כיוון השעון מסביב לחלק המעגלי של מסלול הבדיקה (מוצג בירוק למעלה), ניתן היה לצפות שהמהירות והמרחק של הגלגל הימני יימדדו גבוהים בהרבה מהשמאלי. בהסתכלות על הנתונים, המוצגים להלן, זה נמצא כנכון. מהירויות הגלגל הימני (כחול) והשמאלי (ירוק) נמדדות בממוצע (אדום), ומתיישרות כמעט בצורה מושלמת עם נתוני ה-GPS (סגול).
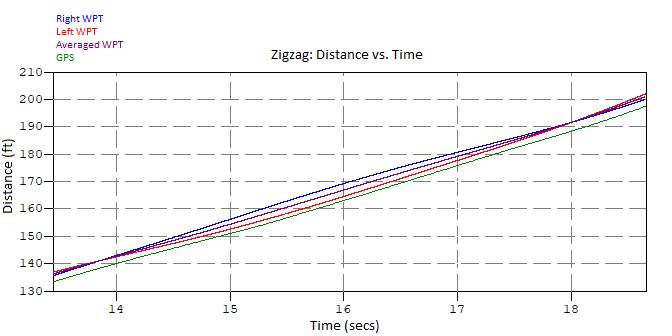
שביל זיגזג
האזור המכיל פניה מהירה ימינה ושמאלה, המוצג בתוך הריבוע הכחול במתאר מסלול המבחן מספק פרספקטיבה מעניינת נוספת. עבור עלילת המהירות למטה, הרכב תומרן בפנייה מהירה שמאלה, ואז מיד ימינה. צורת ה"W" שנוצרה על ידי זה מראה שהגלגל השמאלי (סגול) הלך לאט יותר מהימין (ירוק) סביב הפניה שמאלה, ואז השמאלי הלך מהר יותר מהימין סביב הפניה הימינה. בעוד שני הצדדים היריבים מחליפים מקומות לאורך כל התמרון, הממוצע המחושב (אדום) ונתוני ה-GPS (כחול) נשארים קרובים זה לזה באמצע.
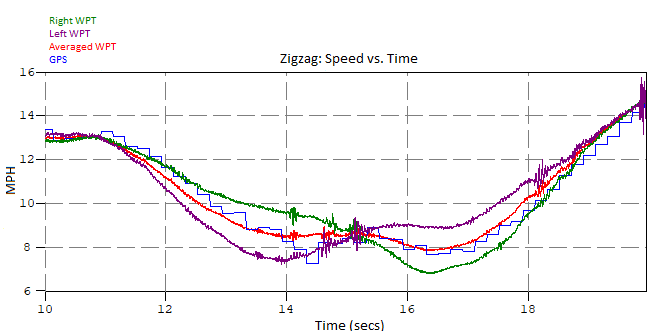
הזמן בין שתי נקודות ההצטלבות בגרף למטה הוא המקום שבו התרחשו הפניות שמאלה וימינה. הגלגל הימני (כחול) עולה על הגלגל השמאלי (אדום) במרחק שעבר, מכיוון שיש לו רדיוס גדול יותר להסתובב במהלך הפנייה שמאלה, שמתחילה בסביבות 14 שניות ומסתיימת בכ-15.5 שניות. בשלב זה, הגלגל הימני נסע רחוק יותר מהגלגל השמאלי. הפנייה ימינה מתחילה מעט לפני 17 שניות, והגלגל השמאלי משיג את הגלגל הימני עד שהפנייה מסתיימת ב-18 שניות לערך. המרחק הממוצע (סגול) שנסע נשאר מרוכז בין השניים. מכיוון שהשיפוע של המרחק הממוצע ושל ה-GPS זהה, הם עדיין רושמים את אותה מהירות ושינוי במרחק. עם זאת, ה-GPS נמצא בפיגור של כמה מטרים מאחורי ההגה, ומכאן ההיסט הקל בנתונים.
שְׁגִיאָה
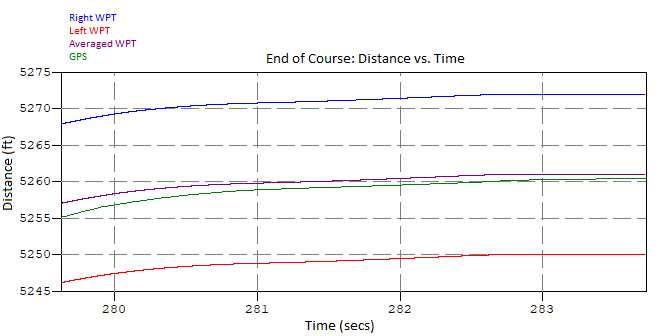
נקודות הנתונים האחרונות של הבדיקה יכולות להראות את היתרונות של שימוש בשני WPTs ולא רק אחד. אם נעשה שימוש ב-WPT אחד בלבד, למרחקים שנרשמו תהיה שגיאה מקסימלית של 0.22%. עם זאת, על ידי התקנת שני WPTs וממוצע שלהם, השגיאה היא רק 0.0115%, ירידה של פקטור של 19. זה מראה ששימוש בשני מתמרי דופק גלגלים יכול לעזור להפחית שגיאות שיכולות להצטבר על פני מספר סיבובים.
בדיקה זו היא רק אחת מתוך מספר רב של בדיקות שונות המשתמשות במתמרי דופק גלגלים. מערכת מדידה עמידה ומדויקת מועילה למעקב מדויק אחר מיקום הרכב ומהירותו בכל סביבה. אם תרצה לדון ביישום בדיקת הגלגל שלך, צור קשר עם נציג מישיגן Scientific היום.